
ウアクソ アクソ
UEWA の船内の中枢です。ご覧のとおり、感覚器官の大部分が XOODI NAA (膜) の全域に均一に配置されています。しかし、UEWA OEMM のまさに根幹に位置するこの敏感なコアを中心に位置する機器は他にもたくさんあります。防御装置もいくつかあります。主なものを列挙します。
電磁周波数を受信する装置、UULODOO(地球上のカメラと同様の機能を持つ画像を取得するためのカメラ)、遠隔地下探査用装置、当時打ち上げられたUEWAから指示された自律測量装置を発射する装置、基準に関連する速度記録装置モデルとして選ばれたシステム、低重力周波数受信機、分光器、音響分析装置、星の画像の記録とその自動識別 (興味深い事実として、XAANMOO CENTRAL は、恒星質量の識別のための特殊なメモリに、構造的特徴 – 質量、放射スペクトルの体系化に役立つ 12 26桁の情報を備えていることをお伝えします)すべての周波数について、 – 体積、各周波数の標準距離での周囲の画像、軌道、基準銀河系との関係の状況、その構造の開発計画など。 – これらの数字の一部のみを使用します。蓄積物や星などの画像(単に光スペクトル帯域に対応する画像を指すわけではありません)が撮影されると、その特徴が順番に分析され、適切にコード化されます。次に、XAANMOO は、研究対象のものと非常によく似た物理的特徴の合計を示す銀河内または銀河外の実体を見つけるまで、その記憶モデルで検索プロセスを実行します。この識別プロセスは、UIW の数千分の 1 の期間にかろうじて達します。対応する事実を比較する場合、一致の範囲が非常に広いため、誤差は実際にはありそうにありません (10 -16のオーダー)。 2 番目の逆タイプの問題は、XAANMOO に保存されている銀河内実体の恒星半球における識別です。これを行うには、目的のエンティティが見つかるまで、ピッチを下げた理想的な螺旋軌道 (地球では 0.002 60 進数秒) に従い、2 π ステラジアンの立体角全体を検出器で「スキャン」します。ただし、このために、遠方の星の光学記録を可能にする UULXOODII OEMM システムを使用します (付録の注 16 を参照)。
UAXOO AXOO コアに統合されたもう 1 つの重要なデバイスにより、UEWA は銀河基準系における位置を知ることができます (注 8 を参照) 。
注5:
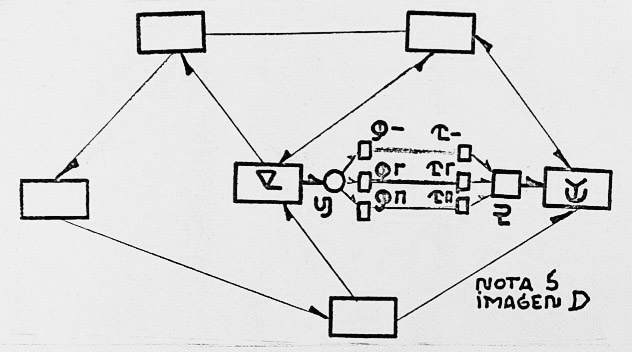
3 つの情報フロー伝送システムはネットワークのブランチで同時に使用され、応答には高い信頼性が必要とされるため、3 つのチャネルすべてが同時に故障する可能性が大幅に減少します。画像 D の図では、その間に情報が流れる必要がある 2 つの器官 (
(D69-N5-1) ) と (
(D69-N5-2) ) を持つ AYUU (ネットワーク) をシミュレートします。
(D69-N5-D)それぞれ有彩色(黄色、青、アナラン翡翠)のリングの3つのチャネルは、それぞれ光、重力、核共鳴チャネルによる伝達を表しています。
(D69-N5-3)と
(D69-N5-4)は それぞれ信号の微分器と積分器を表します。後者は重要な機能を実行します。システムにとって外部の寄生源から来る妨害を除去することにより、3 つのチャネルで受信した同じメッセージの内容を比較します。 (送信時間はシステムごとに異なり、「核共鳴」の場合はゼロであることに注意してください)。今後、ネットワークを記号化することにより、 各分岐の図を断片的な線または点の連鎖で表すことによって略記します(イメージ E) 。 … …) その機能が情報的であるもの、またはあなたが言うように、感情的、敏感、求愛的などです。一方、コマンド、モーター パルス、制御デバイスの制御信号などを送信する場合は、実線 (_____________) でコード化され、これらのブランチを次のように呼びます。モーター (最初のケースの例: ガスの圧力に関する情報の送信、および 2 番目のケース: 制御された勾配で磁場発生器を制御するために放物線状の分岐 の形でパルスを送信 )。
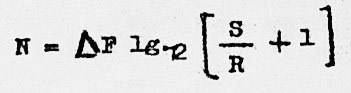
ネットワークのすべてのブランチが 3 つのシステムすべてを介した通信を許可しているわけではありません。多くの場合、ガラス繊維の束 (注 3 を参照) が破壊的な機械要素を構成するため、情報の流れを光学的に伝えることは不可能です。命令の発行またはモーター命令の送信は、異なるコーディングで記述された各チャネルで実行されます。少なくとも 2 つのチャネルでは、送信される周期関数の周波数成分 (SINUSOID FREQUENCIES) の分析によって送信が行われます。または、非周期関数の場合は、値の選択が実行されます。統計サンプル。このようにして、十二進法で一連の単純な数値を取得し、それらを送信するためにコード化します。少なくとも1つのチャンネルは、高い信頼性を維持しながらコーディングせずに原始関数を繰り返します。そのため、受信した非周期関数は最初の関数の忠実なイメージとなり、この場合、いわゆるノイズレベルが実質的に排除されます。 OAWOENNIU の送信 (注 4 を参照) (核共鳴)。実際に次のことがわかります。
(D69-N5-5)N. = 1 秒あたりのパルス数ΔF = チャネル幅 (周波数)S/R = 信号とノイズ間の電力関係。 非常に短時間で複雑なメッセージを送信できるようにすることで、情報容量を大幅に増やすことができます (ただし、このケースでは単純な非 2 進数を使用することでこの容量が減少します)。 (残念ながら、これは光チャネルには当てはまりません。すでに古いシステムとみなされ、特定の AYUUBAA (ネットワーク) では廃止されているためです)
地球間および大気圏のナビゲーション
当社の OAWOOLEA UEWA OEMM は、独自の銀河座標系 (極と呼ばれるタイプ) を参照系として使用します。このような基準系を具体化するプロセスは、地球単位で IUMMA (私たちの太陽星) の距離にそれぞれ位置する銀河内の 4 つの放射線源を選択することで構成されます。
12,382.26 パーセク
19,002.64 パーセク
31.44 パーセク
899.07 パーセク
これらは、XAANMOO が最も安定した (および他の特性から) ものの中から選択した銀河内放射核です。銀河基準系に対するそれらの動きは完全に既知であるため、放出核までの距離が非常に正確にわかっていれば、適切な計算プロセスのおかげで、単純な変換関数によって理想的な基準系内で問題点を特定することが可能になります。 。実際に測定するのはこの距離ではなく、問題点 (この場合: 宇宙船) から放射源自体までの理想的な光線によってそれらの間に形成される角度の三角比です (注 8 を参照) 。このため、付録ノートで説明するように、UEWA は中央の XANMOO に情報を送信する 4 つの「データ取得」(UAXOO) 機器を備えています。極位置座標が一度「分かる」と、UEWA が一定時間たどる軌道に関連する一連の事実が統合され、任意の瞬間に銀河系との距離を表示できるようになります。エンティティ (UMMO など)。さらに、このデータは、危険であることが知られている領域(高密度の宇宙石、強い放射線、星の近くの高温など)を回避することで軌道を自動的に修正するために使用されます。当然のことながら、そのような情報は、他の UAXOO 機関 (DETECTOR) によって提供されるデータに (同時に) 追加されます。 XANMOO は 2 つの情報ストリームを比較します。矛盾が現れると(これは、銀河の構成に関して記憶された要素が間違っていた、またはUAXOO(トランスダクター)が妨害されたという事実による可能性があります)、その瞬間、他のUAXOOが前者の情報の信頼性を確認するために使用されます。 。宇宙飛行士の兄弟たちもこの異常の存在を知らされており、それに応じて行動することができます。
UEWA OEMM が 3 次元フレームの変更に頼る必要がある時点で、私たちは OAWOOLEAIDAA と呼ばれる現象を人為的に引き起こします。次に、ITOOA (図 7 を参照) と呼ばれる理想的な表面積によって制限されるエンクロージャ内にあるすべての素粒子が反転され、他のプリミティブ フレーム内に位置する観測者の物理的制御から消えることができます。
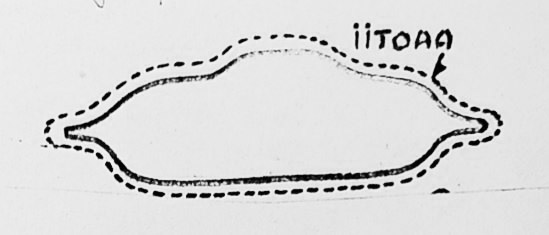
(D69-7)
新しい現実の参照系では、私が前に述べた、船の「ビーコン」として機能した放射源は、この新しい三次元の枠組みで輸送される船にはもはや存在せず、私たちの銀河自体が存在しなくなります。たとえそれがどれほど敏感であっても、あらゆる検出器によって感知できる実体であること(少なくとも私たちの科学では、別の三次元フレームワークにアクセスでき、同時に最初の答えをもたらす物理システムをどうやって考え出すことができるか想像できません) 。
しかし、宇宙旅行者にとっては、新しい枠組み、宇宙の新しい「視点」です(この軸の変化を「第二の」WAAM (UNIVERSE または COSMOS) への移行として解釈するのではなく、宇宙の新しい認識として解釈すべきです)
ただし、等方性ではありません。高度にイオン化された「無限微粒子」の質量、電磁場、大きな星雲の分布による重力場の新たな存在が、新たな暫定ルート基準として機能します。
UEWA OEMM は、OAWOOLEAIDAA よりも前に、この現象のレベルで経験される質量の増加による対応する増加を伴う、新しい 3 次元システムの初期運動学的段階を構成するレジーム速度に到達していました。
現時点では、中央は彼にとって異質なシステムです。このすべての情報はコンピューター化され、身廊が古い 3 次元の枠組み (つまり、私たちによく知られている銀河系) に戻った場合の新しい位置がどのようになるかをその瞬間に計算します。当然のことながら、私たちは UXGIGIAM ONNOXOO と呼ぶ「空間の折り畳み」の数学的関数を比較的正確に知っています。このような返品状況における評価誤差は、大きさがさまざまです (数百 KOAE (1 KOAE = 8.71 地上キロメートル) 程度から、最大 10 5 KOAE程度の誤差まで)。これらのエラーは次の原因によるものです。
。 UEWA の限られたリソースでは絶対的な参照系を設定することは不可能であるため、新しいフレームワークで選択される新しい参照系は恣意的または不正確であるという事実。
。 WAAM の非周期的な折り畳みと呼ばれる「等力学的条件」は、正確に分析的に計算することができないという事実。これは、地球の数学者の兄弟が今日「ファジー問題」と呼んでいるものです。 XANMOOが行う反復計算処理により、当然ながら近似解を求めることが可能になります。
どのような環境に置かれているとしても、Uewa は、計画された時間内にさまざまな目的地に到着できる速度体制に達するため、また、破壊的な物理的存在 (巨大な物体) を回避するために、その軌道全体にわたって加速する必要があります。たとえば、コスモライト)。加速率が地上単位で表される 24,500 GAL の値に達することはほとんどありません。より高い加速は、保護システムにもかかわらず、移動中のOEMIIに悲惨な生物学的影響を引き起こすだけでなく、NEFの構造とインフラストラクチャにも悲惨な影響を与える可能性があります。 (これらの保護システムの性質については、(注 6) と OOE フェーズ (画像 4) に関連する前の段落ですでに説明しました)。
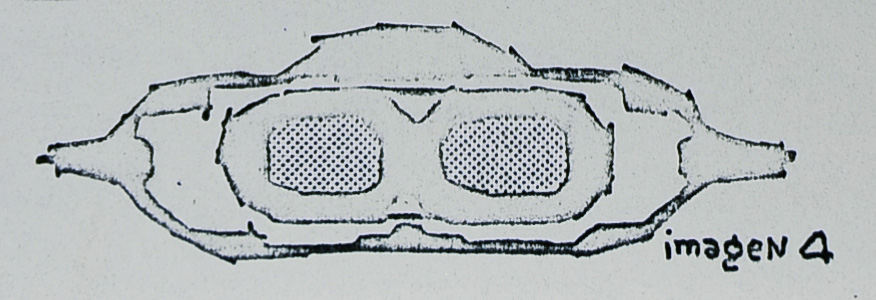
(D69-4)
途中で解決しなければならない最も重要な問題は、UEWA OEMM にとって議論の余地のない危険を構成する 4 種類の要因の存在に起因する問題です。
。恒星の核近くの高温。
。特定の地域の放射線レベルが高くなっています。
。さまざまな口径のコスモライトの衝突による容器の破壊または穿孔。
最初の 3 つのケースに対する最適な解決策は新しい OAWOOLEAIDAA で構成されますが、3 番目のケースでは、危険なコスモライトの存在が一定の距離から簡単に検出できるため、それを回避するために軌道を変更できます。
もう一つの重大な欠点は、宇宙塵による XOODINAA (膜) の外部領域の継続的な摩耗効果です。このような混乱は「短い」旅行では無視できますが、同じではありません。
長旅について。摩擦摩耗により、組み込まれて いるコンポーネントが重大な損傷を受ける可能性があります 。私たちの船には、 (注 19)で説明する保護システムが装備されています。この付録で説明したように、UEWA で観察されるオレンジ色の発光は、この技術的保護の副作用にすぎません。
ご想像のとおり、いくつかの非常にまれなOYAA (冷たい星) を取り囲むガス状の地殻に私たちの船が突入すると、別の深刻な問題が発生します。
?????????????様、先ほど説明したとおり、当社の OAWOOLEA UEWA OEMM のプロファイルは偶然によるものではなく、美的理由や旅行者の存在に従わないものです (注 10 を参照)。
注10:
当社の OAWOOLEA UEWA OEMM の構造形態は、YONNIANA (翻訳不可能な数学用語です) と呼ばれる理想的なプロトタイプに非常に近い特定のプロファイルを示しています。
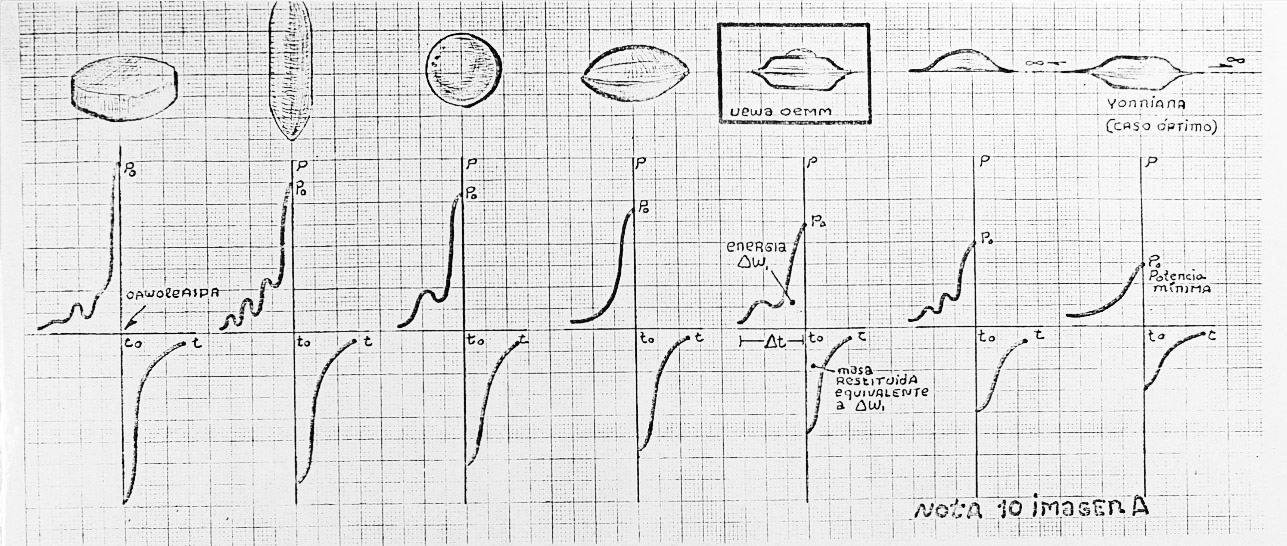
YONNIANNA は、後ほど説明する革新的な固体です。モデルボリュームとしてのその構成は、IBOZOO YUU を反転して別の 3 次元フレームワーク内を移動できる船の構築に最適です。OAWOOALEAIDAA を達成するには、どの質量でもエネルギー入力が必要であり、その量はこの不活性質量の値のみに依存することをすでに説明しました。もちろん、この反転の後、このエネルギーは質量の形でゆっくりと戻りますが、これは別の限界的な問題です。エネルギーの供給が瞬時に起こるわけではないことは明らかです。予備プロセスでは、各瞬間に異なるレベルのパワーが導入されます。 OAWOOALEIDAA の時間 t 0付近では、特定のタイプの構造では非常に高いレベルに達するまで、必要な電力が増加します。POWER 関数 (時間の関数) は、構造の幾何学的タイプ (画像 A) ごとに異なります。つまり、エンクロージャーのプロファイルまたは形状に応じて異なります。
(D69-N10-A)画像では、すべての質量が同一であると仮定して (IBOZOO UU の反転エネルギーが等価になるように) 7 つの構造を表しています。ただし、直径シリンダーの場合、t 0 (IBOZOO UU の反転)に先行する間隔 Δt の各瞬間に作用するパワーがどのように変化して、他のモデルと比較して不釣り合いな値に達するかを見てください。 = APOGÉE (このシリーズでは表現されていない特殊なケースがあります。正四面体です。多面体構成の質量の場合、瞬間 t 0で必要な電力は無限大に向かう傾向があり、一方で Δt は実質的にゼロになります。このような周辺構造は実現不可能です。IMAGEA のシリーズは、「必要な最大電力」に応じたプロファイルの分類基準に従って順序付けされています。 OAWOOLEAIDAA を入手します。 上で示したように、最も適切な構造タイプは YONNIANNAA です。残念ながら、互換性のない動作要件では、最初のタイプのいくつかの機能をまだ保持しながら、プロファイルを強制的に形状に成形する必要があります。銀河内航行と搭載機器の機能に関連する他の複数の条件を同時に満たすのが、YONNIANNA である革命の固体です。セミプロファイルは、きっとご存知の非常に初歩的な関数によって分析的に表現されます。
(D69-N10-1)
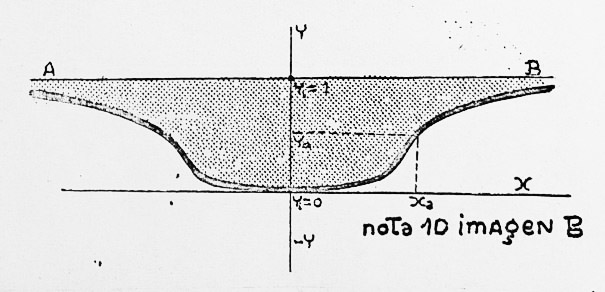
(D69-N10-B)YONNIANNAA を体積で表すと、画像 B の斜線面は、回転体を縦軸 (y, -y) の回転軸を中心に回転させて対称面 AB 上に再現したものになります。赤道面は値 y = 1 で定義され、その体積は理論的には無限大に広がります。一方、このプロファイルまたは別のプロファイルは、銀河空間をナビゲートするために有効です。私が最適プロファイルに言及するとき、そのサブ粒子を反転させるために必要な最小の「最大パワー」に関連してそれを表現しますが、残念ながら、これは「人間にとって馴染みのある空気のような粘性のある流体」内での飛行に関しては当てはまりません。あなた。 (リストの 2 番目の構造が 2 つのオージーブで終わる円柱を表していることに注目してください) 当然のことながら、画像 A のプロファイルはランダムなサンプルとして選択されます。
それらの形態は、現時点で必要な最小限の力で OAWOLEAIDAA (三次元システムの転移) を可能にする理想的な構造にできる限り近づけるという意図に対応していますが、そのためには構造を犠牲にする必要があります。これは、大気などの粘性流体中での移動に理想的な構成 (空気力学的フィネス) です。
宇宙船のこの幾何学的形状は、多くの場合、非常に異なる特性 (化学組成、温度、密度) を持つガス層内を移動する必要がある構造のため、空気力学の公準とあまり一致せず、新たな一連の避けられない問題を吸収する必要があります。空力設計により大幅に軽減されます。
実際: 私たちの UEWA の 1 つが、この流体にとっては極超音速と言える速度で大気の最も密度の高い層を貫通すると、熱は衝撃層と境界層の両方によって XOODINAA に伝達されます (私はこの流体に馴染みのある用語を使用しています)。私たちの流体力学の概念は異なる方法で定式化されているため、その高いアブレーション能力にもかかわらず、多くの臓器が損傷を受けることなく境界線の症例では吸収できませんでした。表面が溶けなくても劣化します。
「境界層」の層流状態が制御されるように UEWA のプロファイルを幾何学的に一致させることは不可能であることを考えると、エネルギー損失も非常に高くなります。これは、特定の段階では乱流になることを意味します。
要約すると、問題全体は、次のような方法で、船舶のプロファイルを変更することなく、いわゆる「境界層と衝撃波」を制御または厳密に制御することに帰着します。
。境界層のセクション全体にわたる速度勾配とその厚さの両方を正確な制限内で制御できるため、層流状態から乱流状態への望ましくない移行が防止されます。
。 最も不利な状況でも熱伝達が耐えられるように、各速度、XOODINAA (膜) までの両方の 実際の距離を制御できます 。
これらすべてにもかかわらず、蒸散したリチウムの蒸発を利用して高い冷却値を達成する必要があります。
容器の気体または液体の輪郭を効果的に制御することを可能にする技術は、この単純な説明文書では検閲されており、その科学的根拠は地球の専門家には知られていません。 (注11を参照)
注11:
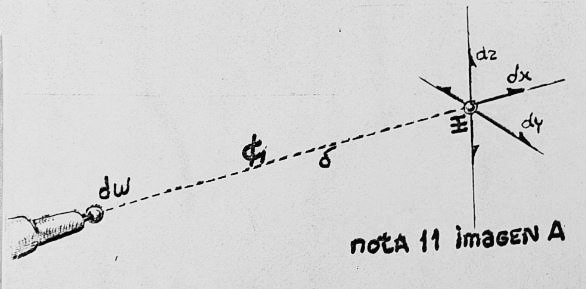
遠隔エネルギー伝達のおかげで、流体分子の熱勾配 (したがってその平均速度) を制御することが可能です。 YUUXIIO (ガス制御機器) から 一定の距離(D69-N11-2)に位置し 、定義された軌道に沿って所定の運動エネルギーで移動する分子
(D69-N11-1) (画像 A) を想像してください。
(D69-N11-A)分子へのエネルギー dW の伝達、つまり分子の慣性状態 (速度、質量、方向) を変更する伝達を実行できます。この伝達 dW は、YUUXIIO 機器によって生成される増加するエネルギーの微小な部分であり、その値は ΔW になります。
それで :
(D69-N11-3)(D69-N11-4) YUUXIO 収率および分子量パラメーター: dm
(D69-N11-5) (dm)
(D69-N11-6) (画像 A では、キャラクターによって表現される距離として表現されます
(D69-N11-2)
容器から非常に離れた気体層を制御したい場合、非常に大きな活性化エネルギーが必要となることは明らかであり、これは実際には大量の流体の制御が実現不可能であることを意味します。
YUXIDOO 装置は、隣接するガス層の動的勾配のプロファイルを変更する機能を備えており、DUII (COURONNE DE LA NEF、画像 1 を参照) の環状セクションに設置されています。20)。
(D69-1)
飛行性能も広い許容範囲内で保証されます。たとえば、UMMO タイプの大気圏での飛行に選択される標準速度は 12.08 MACH (地上単位に換算) です。この状況では、衝撃波の圧縮により、温度は 3500°C を超えます。ガス分子は解離すると強くイオン化され、周囲の層に伝わる熱が非常に高くなります。