
| ウモアエレウェ | これは私が所有しているオリジナルのコピーです。 |
言語: スペイン語 部数: オリジナル 1 部、ただし複数作成しました特派員の名前は削除しました
お客様:
昨夜の電話での会話の中で、私たちの OAWOOLEA UEWA OEMM (SPACESHIPS) に関するいくつかのコンセプトについて説明を求められました。この要約レポートは純粋に説明的な性質のものであることを警告しつつ、許可された範囲内で、またタイプされたシートの限られたスペース内で、あなたの自然な好奇心を満たすよう努めます。
しかし、最初に、ご希望の名前を提供できなかったことをお詫びさせてください。昨夜のあなたの度重なる主張は私にとって苦痛でしたが、このOYAA(コールドスター)の兄弟探検家の私たちの小さなコミュニティに関する安全上の理由により、おそらくあなたにとって極端で、不条理で一貫性がないように見えるかもしれない特定の行動形態を採用するよう私たちを駆り立てるのです。しかし、これは間違いなく、地上波ソーシャル ネットワークに関する当社の戦略の一部です。
電話通信中に発生する中断は、単純な切断によるものではありません。これらは、お客様の電話回線との異常な分岐を確立するために採用しなければならない新たなプロセスの避けられない (技術的に、簡単に説明可能な) 結果です。これらの後退は、電話交換機にトランジスタ通信システム、または場合によってはクロスバー装置 (ペンタコンタ) または同様の技術が装備されている場合にのみ解消できます。
UEWA OEM の構造
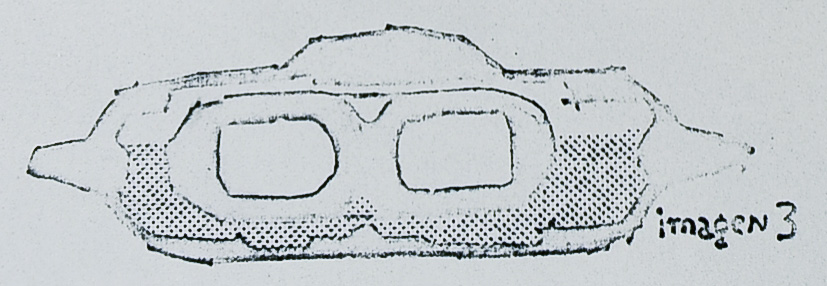
色鉛筆で描かれた血管のスケッチは、その本質的な形態を大まかに説明します。 &&&&&&&&&
様、その構造構成、推進システム、IBOZOO UU の反転技術、制御システムなどについて、完全または網羅的な説明を提供できないことをご理解いただけると思います … 図面 私たちがお送りする説明とグラフィック開示の可能性がいかなるリスクもないように、十分にサニタイズおよび短縮されています。地球科学と技術の革命に使用される可能性のある、真に科学的な種類の情報はすべて、慎重に検閲されています。 添付した図では、例外なく、皆さんがよく知っている数字に対応する番号を割り当てるように努めました。したがって、私は、それがたとえ恣意的で不忠実であっても、技術的な性質の先住民の音素を地上の同等の音素に置き換えることによって、それらを含めることを可能な限り制限しようとしました。私たちの意見では、最も特徴的であると思われる構成要素のみが、この説明では元の単語と関連付けられています。
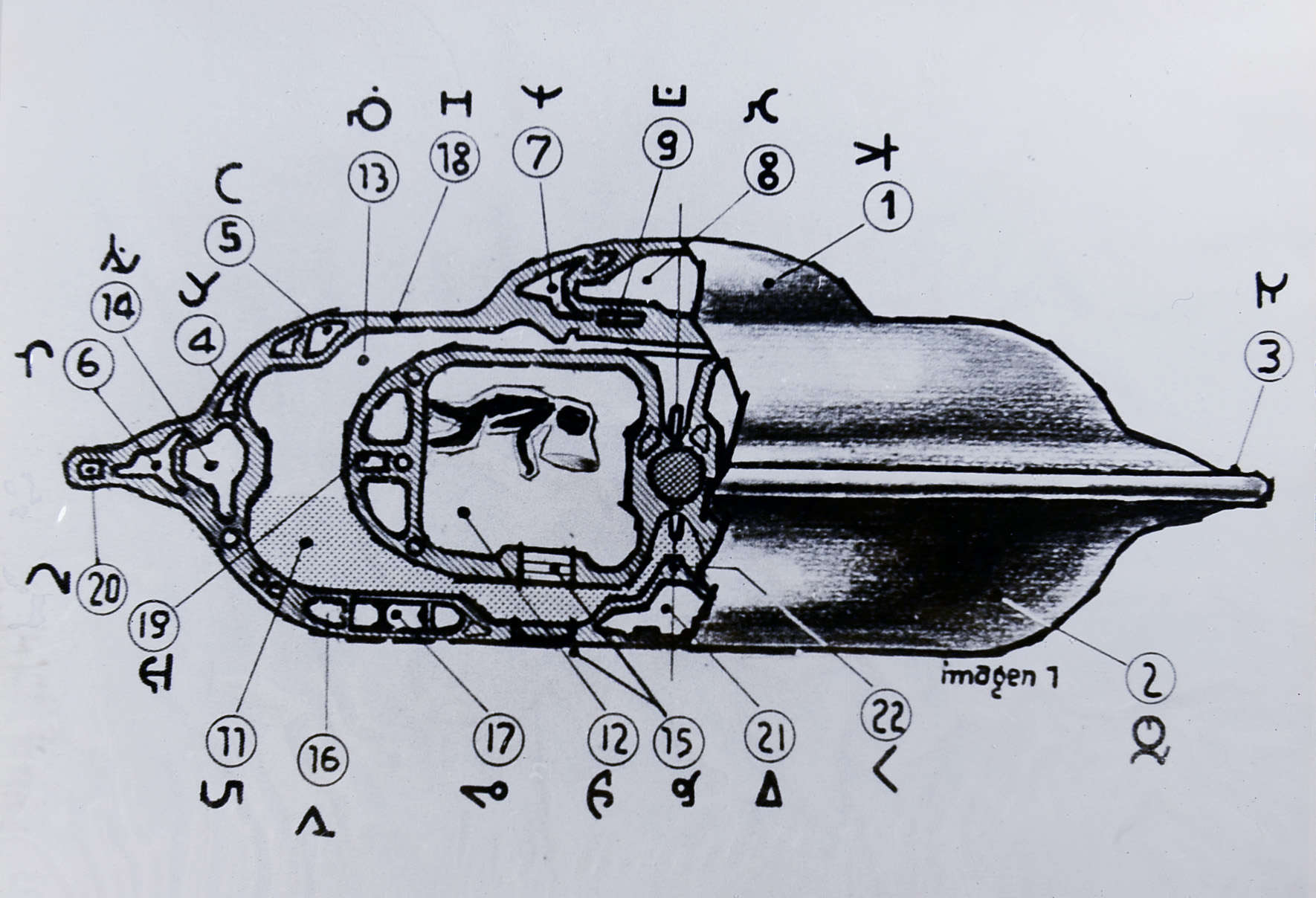
(画像 1) は、UEWA の構造の正面断面図の基本スケッチを示しています。
(D69-1)画像番号 1 (説明)
1ENNOI UEWA OEMM の上半球にある突起、タレット、またはドーム (その膜は透明です)。
2ENNAEOI 船の上部構造の中央本体
3DUII UEWA を囲む赤道リングまたはクラウン。
4AAXOO XAIUU AYII 磁場発生器トロイド。
5NUUYAA 過酸化水素と溶融リチウムのトロイダルタンク。
6IDUUWII AYII DUII に埋め込まれた環状の筐体内に配置された推進装置。
7エネルギー発生器。リチウムとビスマスの質量をプラズマに変換した後、エネルギーに変換します。
8IBOZOOAIDAA IBOZOO UU反転用の中央制御装置。
9XANMOO 自律型周辺コンピュータ (中央の XANMOO は、12AYIYAA OAYUU(画像1の中央球)
10コピーでは検閲されています。
11課税されたゼリーまたはゼラチン状の塊(AYIYAA OAYUU の内部を占めています)12使用中です)。
12ああああああああゆう フローティングキャビン。
13YAAXAIIUは「磁気空洞」と訳せます。
14このトロイダル構造には、多数の UEWA 機器が組み込まれています。磁場発生装置の一部、XOODINAAの制御本体、食料タンクや輸送用移動機器、アクセサリー製造装置など。
15いくつかのアクセスハッチが見えます。
16ヤー・ウーシー (水銀タンク)
17他の要素、出現するリフト脚、要素変換器などの間に位置する複雑な環状の筐体。
18XOODINAA UEWA を保護する膜、樹皮、外壁、または鎧。透明で均質なENNOIを除いて、それは不透明で構造が非常に複雑です。
19
20YUUXIIO ガス環境制御用トロイダル装置。
21UAXOO AAXOO 送信および検出センター、シールドされています。
22ENNOI AGIOA アセンブリのキューポラまたはコーン。中央のザンムーの制御下で溶解または再生することができます。
外部の観察者は、次の 3 つの明確に区別された部分を区別します: (画像 2) ENNAEOI (超構造体の中央本体) ENNOI (塔またはドームの種) および DUII (主要構造体の赤道面にある環状翼)
(D69-2)
当社の UEWA のプロファイルは、陸上航空技術において高い弾道係数を示し (楕円形など)、粘性流体内で高速を達成するために繊細さが必要な形状の採用にはつながりません。これは、私たちの運動技術が地球で使用されている初期の方法とは根本的に異なるためです。
.) 非常に延長された軌道上の動きは、WAAM (COSMOS) でよく知られているものとは異なる 3 次元のフレームワークで行われます。
(私たちの基本的な推進力は、あなた方が知っているものとは異なることに加えて、将来の宇宙計画で計画されているものよりも大きなエネルギー容量を持っています。
.) 後で説明するように、流体境界層によってもたらされる問題は特別な技術で解決されます。
THE ENNAOEII (画像 2 の中央本体:2)
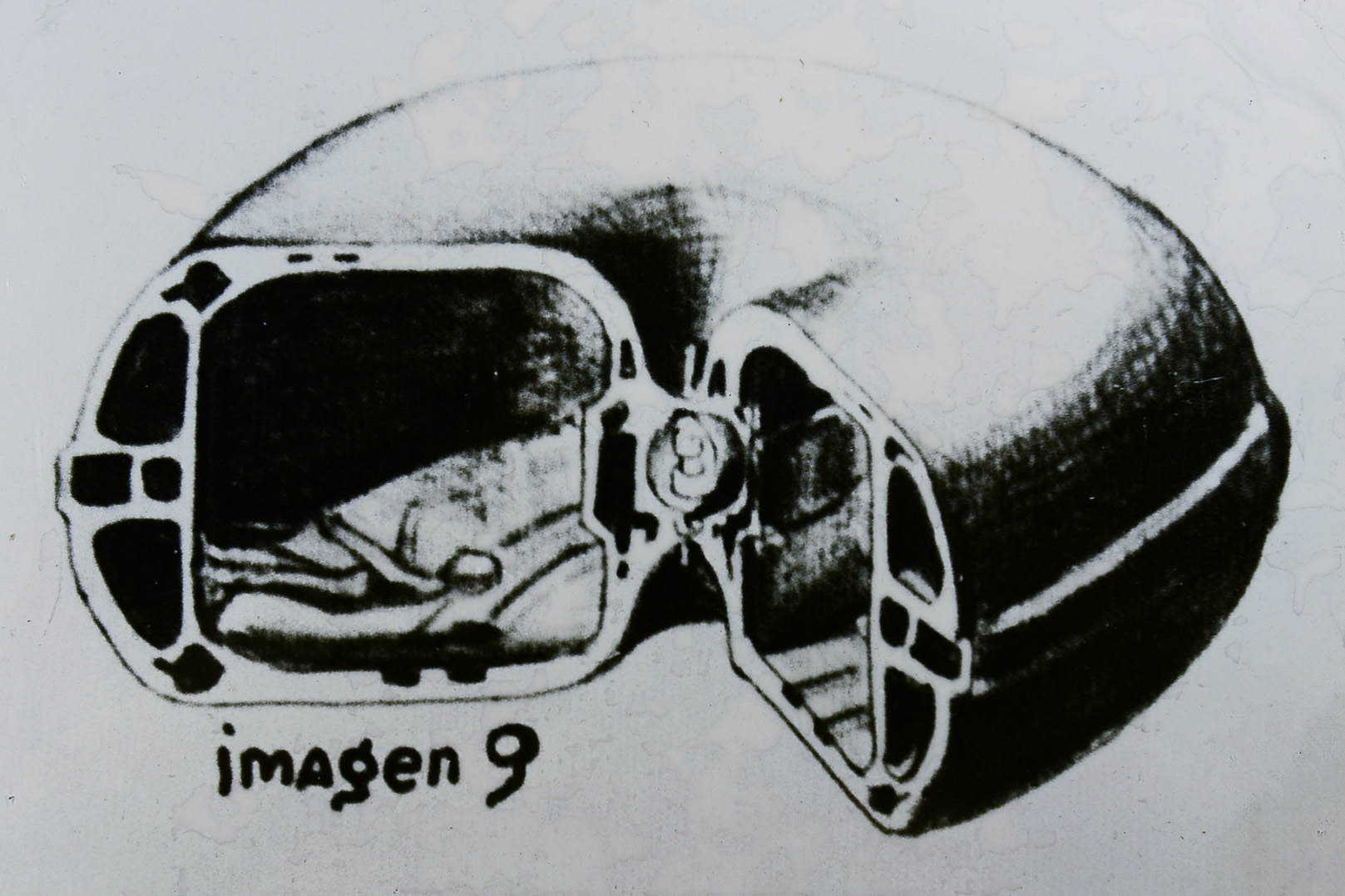
UEWA (ENNAOEI) の中心コアは円筒形状の構造です。内部(中央空洞:画像1:13) AYIYAA を見つけます12(正確な翻訳は「FLOATING TOROID」となります)。この 2 番目の構造は、制限された制限内で中空の筐体内を移動できる大型のトロイド型キャビン (画像 9) です。13ENNAEOⅡの(画像4)。
(D69-9)
(D69-4)
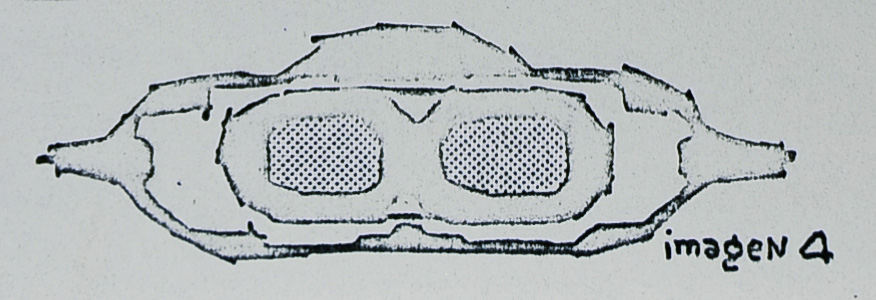
船が離陸するとき、または設定された目標の近くに到着するとき、また一般に航行 (軌道) 中に強い加速度 (速度や方向の突然の変化) が予想されるとき、AYIYAA は YAAXAIUU (磁気空洞) 内に浮かびます。13)、つまり、高周波で非常にエネルギーの高い磁場(周波数:3.26.10 4サイクル/秒)の内部です。 「サスペンションまたはフローティング」を意味する OEE (画像 4) と呼ばれる段階では、キャビンはプログラムされた自律性を享受し、後で示すように、その相対的な動きは突然の動的変化に従属します。
AYIYAA と ENNAEOI の間の空洞には、高圧でアルゴンと酸素のいくつかの同位体によって形成された混合物が含まれています。
緑色のドットのラスタライズの色付きの塊 (画像 4) は、この OEE フェーズ中に AYIYAA の客室を満たし、乗組員の身体と旅行中の残りのモバイル機器を保護するゼラチン状の塊に対応します (注 6 を参照)付録に記載)。
注番号 6
EEWEANIXOO は、いわゆる「SCUBA」または GARMENT を構成します。実際には、この保護は、特定の飛行条件に応じて、異なる特性を備えた他の保護に徐々に置き換えられています。EEWEEANIXOO OOE は、AYIYAA OAYU の段階で正確に使用されます (画像 1)12)またはTOROIDAL CABINにはDAXEEと呼ばれるJELLYが詰められています。このゼラチン状の塊は、他の機能とは別に、UEWA の加速または減速手順中のショックアブソーバーとして機能します。
したがって、OEMII トラベラーはこの粘性の塊の中に埋め込まれており、同胞から直接隔離されており、時には 245メートル/秒2 を 超える加速度の力学にさらされています (ただし、これらの加速度のピークは UIW の数分の一の間続きます)。これらの「衣服」と BIEWIGUU AGOYEE システム (精神的および生理的生物学的コントロール) の両方の説明には、開示の観点からこの文書と同じくらい多くのページが必要になります。要約として、EEWE (衣類) は、表面が OEMII (人間の身体) の表皮と接触することなく、旅行者の身体を周縁的に取り囲む複雑な膜であることをお伝えします。全体はゼラチン状の塊の中にあり、特定の方向の加速度が発生した瞬間にゲル状の物質が環境中で液化し、旅行者の体は外部の助けを借りて効果を発揮できる姿勢をとる。最小限。 EEWEEANIXOO OOE の内面と人間の皮膚を隔てる空間は、表皮の毛細血管拡張の程度と発汗に応じて厳密に制御されます。このようにして、体の代謝熱は、通常の飛行条件下では正常な値を採用します。圧力、二酸化炭素の吸収、窒素、酸素、水蒸気および内部構成成分のその他の成分の調節は、呼吸器、循環器の代謝および生理学的活動を常に監視する検出器によって提供される情報に従って自己制御されます。そして表皮系。生理学的モニタリング装置には、そのような xxxxxxx (彼が UAXUOETY または OAXUOETT と言ったかどうかはわかりません。このメモはタイプ打ちされています) を導入することなく、有機組織内のほぼすべての有機機能をチェックする非侵襲性トランスデューサー プローブが装備されて います。筋肉活動やグリコーゲンと乳酸レベルの評価から、被験者の心理状態に関する正確なデータを提供する神経皮質活動の複雑な制御まで、生物学的動態の全範囲が記録され、ほぼ 2.16.10 6の有益な 情報が提供されます。 XANMOO にチャンネルを送り、XANMOO が標準モデルと比較した後、臓器へのエフェクターやモーターの反応を「指示」します。ビエウィグ・アゴイエ。
給餌は口からペーストを導入することによって行われます。一部の食品や水は、唾液に触れると溶ける無味の包装のカプセルの形で導入されます。温度勾配は、エンクロージャのさまざまな周辺ゾーンで異なります。 OOE フェーズの加速度がゼロまたは中程度の区間で旅行中に経験する感覚は、暖かい空気のマットレスの中に浮かんでいるような穏やかな感覚として定義できます。簡単な外科手術で 2 つの制御装置を膜迷路近くに導入したおかげで、人工重力を生み出すための AYIYAA OAYUU の回転によって引き起こされる前庭効果はほとんど感じられません (組織や組織を損傷することなく 2 つの針状インプラントが導入されます)。動脈および神経ネットワーク)。EEWE から表皮を分離するエンクロージャは、顔のレベルで円錐台形のかなりの拡大を受けます。目から 23 センチメートルの距離を 130 度の角度で取り囲むこのような幹の基部は、その表面に 16.10 7個ほどの興奮性中心を備えたスクリーンを表しており、各興奮性中心をさまざまなレベルの強度で全体に拡散させることができます。 3.9.10 14~ 7.98.10 14 サイクル/秒の電磁スペクトル。得られる画像の解像度は、両目では通常の視覚認識とこの器官によって人工的に生成された視覚認識とを区別できないほど十分に高い。両眼視機能は、各発光中心がプリズム状に配置されていることで実現されます。反対側の顔の励起は、2 つの目のうちの 1 つがもう 1 つの目の画像にアクセスできないように、非常に複雑な方法で実行されます(画像 A) 。トランスデューサーは、2 つの球体の目の筋肉によって生成される電場 (実際の筋電図) を記録します。したがって、XANMOO は瞳孔軸の方向を常に把握しています。一方、パネルを構成する励起可能なプリズム(後者は微細な寸法である)は、自由に回転できる粘性エマルジョンの層の表面に配置されています。これらのプリズムは二重磁場によって機械的に制御されるため、プリズムの半分は水平成分に従い、残りの半分は横成分に従います。このようにして、地球人が使用するベネチアンブラインドのように、光が入る角度を調節するロープを引っ張ると、両方のグループが独立して顔の向きを変えます(この場合、「紐」は2つの磁場になります)。そしてその原動力となるのは、眼球の筋肉の微小な動きに対する XANMOO の反応です。
両眼知覚は通常の浮き彫りの画像を提供するため、被験者は環境や周囲のゼラチン状の塊から遠く離れた現実の世界を経験していると信じます。彼は「近くに見える」物体を取ろうとすることができ、粘性媒体の抵抗にもかかわらず動きの自由が広いため、筋肉の不活動を避けるために「試みる」ことをお勧めします。音響刺激は画像と同期します。旅行者は兄弟たちの顔を見たり、彼らと話したり、遠く離れたUMMOの森のANAUGAA(樹種)の凍った風景に浸ったりすることができます。鼻腔内に収容された 2 つの YOYGOAAXOO は、自然環境よりもリッチではないものの、十分に高速な、画像と同期した IAIKEAI (嗅覚刺激) プログラムのシーケンスを提供します。これは、旅行中の兄弟が受ける心理生物学的支配の側面の一つです。 UEWA の制御機器を自由に閲覧したり、学習テキストを読むことができます。最も興味深い方法の 1 つは BOOGOO です。このシステムのおかげで、XANMOO での録音後に、スタイラス (鉛筆またはブラシと呼ぶこともあります) のグリップを模倣した筋肉の動きが注入されます。これにより、実際に描画、グラフ、またはテキストを作成したかのように、手の応答が順序付けされます。この架空の構図の人工画像は、あたかも実際にそのようなグラフィック文字を表面に描いたかのように双眼鏡パネル上に表示されます。直腸に組み込まれた装置が旅行者の排便を収集します。これは最初に脱水され、次に厳密な化学分析を通じて残留物が解離され、酸素または他のガス状化学元素に変換されます。同様のことが尿でも行われ、EEWE のガス状の囲いから残った水に 2 つの排泄物の化学的に純粋な水が加えられ (湿度の度合いは継続的に制御されます)、尿道内の中央の貯水池に戻されます。蒸気の形。
しかし、UEWA (NEF) の移動が、強い重力場から遠く離れた場所、または別の 3 次元の枠組み内、または単純に危険な物理的要因のない空間ゾーンで、フェーズ「AGIOOA」でほぼ一定の速度で行われる場合、キャビン (画像 3) ENNOI AGOOA に適合22(アセンブリドームと訳せます)。次に、課税された塊(ゼラチン状)は「ヒドロゾル」状態(非常に流動性が高く、粘度が低い)になり、YAAXAIUU キャビティのガス混合物の圧力を高めることによって AYIYAA(TOROID CABIN)の外側に排出されます。 13これにより、宇宙飛行士がその内部をより自由に移動できるようになります。すると、この最後の構造を浮遊状態に保つのに必要な強い振動磁場も相殺されます。
(D69-3)
システムと機器
すべての UEWA 補助機器は、AYUU (ネットワーク) 内で規制され、XAANMOO (その技術が真空管やプリント回路の特性に基づいていないことを除き、地上波電子コンピュータと同様の機能を実行する機器) の制御下にあります。あなたのプログラムと同様に、付録の注 1 を参照) のプログラムと決定は、極端な場合にはメンバーによって変更される可能性があります。乗組員。
注意その1
OYAAGAA (PLANET EARTH) テクノロジーで使用される制御システムと私たちの制御システムの間には、その複雑さと精度を除けば大きな違いがあります。XANMOO (計算機、コンピューターと呼ぶこともあります) は、地上のもののような電子回路、つまり、真空管、トランジスタや固体ダイオードなどの固体コンポーネント、導体や半導体、インダクター、静電容量などで構成されていません。しかし、それらは安定した結晶にトポグラフィー的に統合された器官によって構成されており、これを ODU GOOA (核増幅器) と呼びます。その主な特徴は、電圧や電圧ではないという事実によって構成されます。地上波アンプのように増幅される電気強度ですが、電力です。 ODU GOOA に入力エネルギー関数を注入すると、出力では別の同一の分析関数が生成されますが、毎回より高いエネルギー値が得られます。エネルギーの制御された放出は、増幅器に組み込まれた質量を犠牲にして行われ、この現象は分子スケールで次元的に発生します。このプロセスには十分な数の原子が関与するため、関数は巨視物理学的に連続的であると考えることができます。
注記番号 2
デジタル データの記憶は、地上波デジタル コンピュータの周辺メモリ ユニットと同じ方法では実行されません。つまり、トロイダル フェライト コアの 2 つの磁化状態、または強磁性または静電エマルションで覆われたストリップやディスクを使用して実行されます。 、などですが、技術的にバランスのとれた純チタン結晶の電子励起状態の厳密に制御された変化によるものです。コーディングは 3 つの高周波直交ビームを使用して実行されます。XANMOO のこれらの器官の単位体積あたりの膨大な記憶容量により、OEMII (MAN) の生理学的目によって得られる画像よりも優れた解像度の画像から、「統計マトリックスを表す膨大な範囲の数値。主な問題は、アクセス基準によって高速かつ強力な情報の流れが可能になるように、この情報の性質に応じた分散プログラミングで構成されます。
システム間の調整:
。 IDUUWIIO (推進力)
OWOOLEIBOZOO (別の 3 次元 システムへの反転 )
KEOYEEOOサポートのフィート) Biewiguu Agoiee (心理生物学的環境の制御) Yuxiio (外部の粘性流体、気体、または液体の制御)
これは、特定の瞬間におけるこれらのシステムの 1 つの動作に関連するパラメータが事前に計算され、関連する残りの機器の応答時間を調整するものです。
この技術は、運用段階では、「コンピュータ支援フィードバック制御」と呼ばれるシステムに似ています。違いは、私たちの「コンピュータ」(XAANMOO)が、最初の段階で連続関数(アナログ)の分析によって動作し、次に統計的サンプリングと基本パラメータ(データシーケンス)の選択の自動プロセスによって動作するという事実にあります。計算は数値的に行われるため、定量化された最終的な答えが得られます。答えの信頼性は、(独自の数学言語で表現された) 単一性と実質的に同じです。画像 5
では、UEWA のすべてのダイナミクスを調整する AYUU (ネットワーク) の概要と略図を提供します。接続された機器を乗組員が直接制御することはできませんが、OEMII (MAN) の頭脳では予見できないリスクがあるため、私たちの兄弟の決定が XAANMOO によって争われないようにするという選択は彼らにあります。