
UMMOAELEWEE
部数 1
言語 スペイン語
ディオニシオ ガリド ブエンディア
マドリード スペイン
爬虫類の魅力の続き
私たちがあなたに送った前回のレポートでは、インドのアフマダバード近郊の小さな町で私たちの兄弟であるYOA 6とEMEE 48が行った研究を要約しました。これは、いわゆる「魔術師」によって知られる最も驚異的なデモンストレーションの1つを分析する傾向がありました。ヒンドゥー教徒。音楽のリズムに合わせて「まるで蛇のように」這い、揺れるロープの魅力。
私たちの兄弟たちの研究は失敗に終わりました。私たちのUULUEUUA(私たちが使用する、非常に高いところまで上昇でき、自動動作が内部でプログラムされている装置)を使用して秘密裏に取得した画像も、その後の地形やロープの小さな繊維の分析も、私たちの兄弟たちだけが発見できたものではありません。それらは植物の繊維で織られていると、陸上の植物学者によって「Corchorus capsularis」という名前で記録されています。サンプルは慎重に調査されましたが、何も異常は見つかりませんでした。一部の繊維は、「マクロホミニア・ファセオリ」として知られる真菌の一種と、いくつかの無害な細菌によって攻撃されました。付着した土の破片は調査された地形に対応しており、脂肪酸エステルの一部の残留物はこの現象に関連していないようでした。唯一の異常点は、検査された繊維に、この地域ではロープの製造に一般的に使用されていない植物であるエスパルトが一定の割合で混合されていたことです。
1957 年 9 月 23 日、私たちの兄弟たちは、不正行為を検出するための経験的方法が失敗した後に知的に得られた唯一のもっともらしい仮説を検証することにしました。もちろん、別の可能性も残っていました。それは、私たちが最終的に、超越的に重要な本物の超心理現象に直面したということです。しかし、後に詐欺であることが判明した他のいわゆる事件と関連した過去のエピソードの悲しい経験と、研究された現象の性質により、この影響は自然なプロセスによって説明できると予測することが可能になりました。この場合、手品や幻想が知覚の歪みを引き起こす可能性があります。得られた画像がこの究極の仮説の実現不可能性を裏付けたことを除いて、兄弟たちの共同提案の可能性を排除することはできませんでした。
このために、彼らは3日前に「神童」を演じたSHAGATへの新たなインタビューを企画した。合意された価格は 110 ポンドでした。 私たちの兄弟たちの疑惑は裏付けられ、多くの詳細が明らかになりました。
このヒンドゥー教がどのように機能したかを見てみましょう。
彼は早朝にフィールドに行き、後でその偉業を実行する必要があります。そこで彼は、次に説明する一連の準備を実践します。この男は通常、午後の早い時間にロープの魔法を実行します。彼は前回のレポートで再現した絵を描いたバスケットを運んでいます。
(基部に 直径約 3 センチメートルの円形の穴があることに注意してください。)
中にはジュートとエスパルトのさまざまな組紐をざっくりと編んだロープが入っており、事前に長さ60~70センチメートルの破片に切られている。
シャガットはその場にいた人々にロープを自由に見せますが、彼らは当然何も異常を感じません。観客はカゴの中身が見えないように十分な距離をとって立っています。その一方で、彼らが望めば、手を中に入れ、ロープの間を動かし、バスケットを調べることができるようになる直前から、疑いも不信も引き起こしません。ヒンドゥー教徒は、その内部には一切触れずにすぐに巧みにバスケットを地面に置き、それから分離するので、それ以上の予防措置は必要ないようです。
残念ながら、UULUEWUAA が取得した画像には、作業中のバスケットの内部が記録されていませんでした。 UULUEWUAA がどのように機能するかを大まかに説明すれば、このタイプのエラーが理解できるでしょう。これらは通常、さまざまなサイズ(数センチメートル程度)の回転楕円体形のデバイスです。内部にはさまざまな制御装置が搭載されています。
A UULODOO: 3 次元画像シーケンスを記録し、即時または遅延して再送信することができます。
UAXOO IXINAA: 734 個の共鳴セルで構成された差動マイクロホンの一種で、各共鳴セルは非常に限られた範囲の音響周波数に対して感度が高められています。可聴範囲は 1 秒あたり 16 ~ 19,500 サイクルに広がります。レベル (実質的にフラットな応答) には、6 デシベル未満のしきい値と 118 デシベルのカットオフ レベルがあります。 (超低周波周波数記録セルは、その寸法が小さいため、それ自体の共振では機能しません)。
IBOAYA NOA UAXOO: 液体ヘリウム検出器 (ポイント) で、ユーザーが呼ぶセンチメートル範囲からほぼベータ帯までの電磁周波数を記録できます。記録装置は周波数、振幅、位相を識別し、同時に検出検証時間を制御します。
マルチバンド送信機、制御体と通信するための重力波の発生機、およびさまざまなデバイスによって記録された情報の再送信機。
さらに、重力レベル装置が装備されており、重力場の記録とそれに対応する推進装置のおかげで、UULUEWUUA はプログラムされたさまざまな高度で自らを維持することができます。磁界は、各点の定数「g」を評価する小型加速度計を使用して測定されます。
(SCN) 2 Hg (チオシアン酸水銀) の分子の自由落下挙動を制御することによって。付録 1 を参照してください。
つまり、デバイスは 2 つの制御モードによって動作します。場合によっては、高周波重力場トランシーバーがコード化された制御パルスを発信し、UULUEWUA が障害物に近づくと自動的に修正されます。装置を担当する陸上オペレーターは、小型 UULUEWAA が検出した視野全体を画面上で確認できます。ただし、この方法は OEMII による継続的な監視が必要なため、ほとんど使用されません。
一般に、デバイスの空間パスは事前に UULUEWUAA にプログラムされます。これを行うために、デバイスのガイドとして機能する必要がある、地形の地形に対応する一連の画像をデバイスに提供します。この一連の画像には、小型車両が従わなければならない計画された軌道が記憶されています。この情報は、化学的に純粋な結晶化チタンのセルに保存されます。
UULUEWUAA は、事前に固定されたこの同じ軌道をどのように移動するのでしょうか? UULODOO (地球人に知られている一種の映画用カメラ) が装備されていることを思い出してください。UULODOO との本質的な違いは、光学対物レンズがガラスレンズで構成されていないことと、白金塩を含む感応フィルムの代わりに、平行移動するスクリーンが使用されていることです。テレビの図像のように、光子を電気インパルスに受け取ることですが、プロセスは異なります)。
なぜなら、カメラは移動しながら、通過する場所の地形の連続画像を徐々に修正するからです。この UULODOO は、感光感度を 7.10 12サイクル/秒 (赤外線スペクトル)の周波数まで拡張するため、主観的な完全な暗闇でも配向が保証されます。
これらの画像は、メモリに記録され、司令部から遠隔操作された別の UULUEWUA によって以前に撮影された画像に「重ね合わされて」います。光学装置は 2 つの画像シーケンスを徐々に探索します。最初のものが記憶されたものと一致しない場合、制御パルスは推進装置の軌道と方向を修正します。この装置は、移動体の軌道に重大な障害を生じない限り、小さな地形の変化 (家具、車両の変更、岩の位置の変更など) によって結果が変化しないように設計されています。このようにして、UULUEWUA は外部からの意識的な制御なしに自らの動きを指示することができ、その軌道のどの時点でも自らの手に取り戻すことができます。 (UMMO では遠隔制御に電磁波を使用することはほとんどありません。重力波を使用すると、エネルギーが極端に減少するという欠点がありますが、寄生擾乱が発生しないという利点があります。)
したがって、これらの非視覚的に指示された UULEEWUAA の 1 つは、その探索ルートが事前に正確にプログラムされていない場合、画像を記録するという使命に失敗することがよく理解できます。これはまさに私たちの目の前で起こったことです。
シャガットがバスケットから離れると、唇で調節して高調波の低いホイッスルを発し始めました (基本周波数: 1 秒あたり 750 サイクル)。
かごからはロープと思われるものが出てきて、苦労して這っています
そしてヒンドゥー教徒が発する笛の音の変動に従います。
それについてはどうですか?実際には、カゴから出てくるいわゆるロープは、カゴの底にあったものと同じではありません。これらは緑色がかった鱗を持つヘビで、OPHEODRYS属のコルブリッドの科に分類されている陸上の昆虫学者に知られており、その長さは40〜70 cmの間で変化し(有毒な牙はありません)、飼いならすのが簡単です。
ヒンドゥー教の魔術師は、条件反射による学習の長いプロセスを彼らに課します。シャガットは熱に非常に敏感で、従わない場合には一連の罰を与え、シューという音の変調を聞くと強制されたリズミカルな動きに従うよう奨励します。また、シャガットは彼らを怖がらせるために熱湯を使います。
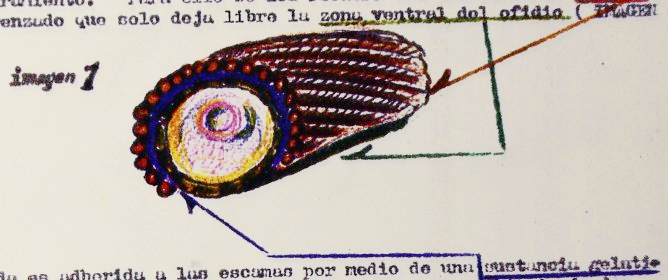
この方法でトレーニングが完了すると、2 番目のトレーニング プロセスが始まります。これを行うために、オフィディアンの腹側部分だけを残すエスパルト またはジュート織りのカバーで覆われます(画像1)
D62-6-img1
このカバーは、 ヒンズー教徒が 2 種類の植物を浸軟化して煮ることによって得られる非常に粘着性の高いゼラチン状の物質を使用して鱗に貼り付けられています(その後、シャガットはデータを提供しなくなり、追加の金銭を要求しましたが、拒否されました)。このようにして、遠くから見ると、人工皮膚を備えた爬虫類は通常のロープのように見えます。
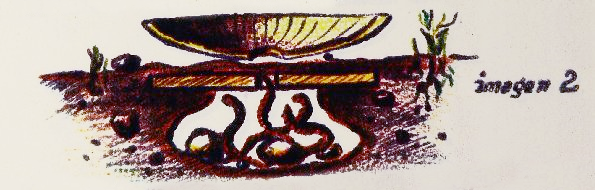
シャガットは朝、 地面の小さな穴にヘビを隠します。彼はそれを穴あきボード で覆い 、泥と石で表面を隠します(画像2)。
D62-6-img2
事前に、彼は彼らに数時間眠らせる催眠溶液を振りかけます。奉仕をしなければならないとき、彼はバスケットの中央の穴を、地面にある穴の位置を示す標識と一致させて慎重に置きます。彼は隠れた方法でボードの穴を指で開けます(湿った泥の膜で適切に封をします)。ヘビは主人の音響命令に従って出てきて、魔法の行為が完了すると人工の巣穴に戻ります。
付録 1
地球の技術者にはまったく知られていないこれらの高度計の基本を知りたいと思うはずです。
実際、航空工学の専門家と地球物理学の専門家は、航空機、車両、その他の装置が位置する高度を測定できる幅広い機器を地球上で開発してきました。従来の基準レベルまたは評価レベル、つまりゼロを基準として採用します。
場合によっては、気圧高度計と呼ばれるものを使用します。これは、高度による気圧の低下に基づく差動タイプの測定値です。このため、機器には、波形の壁と希ガスを備えた古典的なカプセルから、多くのスペイン人エンジニアがまだ慣れていない非常に現代的な「SOLIONES」(真空ダイオードに似たバルブ)まで、さまざまなタイプの圧力トランスデューサーが装備されています。 「容量性」タイプの検出器 (敏感な電機子コンデンサ)、圧電、水銀、可変磁気抵抗、など
物理科学の専門家であれば、ある程度の精度が必要であれば、この高さ測定システムを適応させることができます。
このために、地球の技術者は他のより効率的なプロセスを使用しました。つまり、いわゆるパルス高度計はレーダーと同じ技術に基づいています。 (航空機の下にある地面で「反射」した後の、センチメートルまたはデシメートルの波長の一連の電磁パルスの反射時間またはエコーを測定することによって。
または、周波数変調高度計 は、周波数変調搬送ビームを発射した後、地形の地形で反射して航空機の受信機に戻り、受信した周波数に従って高度を測定します。しかし、地上エレクトロニクスの専門家であれば、特定の地形的特徴や電波寄生虫の存在によって測定値が歪む可能性があるこれらのシステムに対して深刻な反対意見を述べるでしょう。にもかかわらず、あなたが設計した機器は、寸法を縮小できないことを除けば、否定できない利点をもたらします。これらの機器は、分子エレクトロニクスの現代の地上技術によって小型化された回路を依然として使用しています。
私たち UMMO では、 「g」 (重力加速度の定数) の値に基づいて高度を評価する遠隔測定システムを使用することを常に好んでいます。
ご存知のように、「g」の値は、惑星の中心に対する測定点によって異なり、また星ごとに異なるため、実際には一定ではありません。したがって、惑星 UMMO では、その「普遍的」基準レベルでの値は 11.882 メートル/秒2ですが、地球の表面では約 9.8 メートル/秒2に達します。ロケットで一定の速度で上昇する旅行者は、常に「g」の値がゆっくりと減少するのを観察し、それを体重の減少として感じます。
「g」の値、つまりレベルや高さを測定できる私たちの加速度計や重力計は、地球上の科学者にはまったく知られていない技術に基づいています。
私たちの地球技術の探査では、地球物理学者によってほぼ常に重力計という名前で使用されている一連の機器がテストされました。したがって、古典的な振り子重力計、 スプリングバランスを備えた重力計、加圧ガスを備えた重力計、および重力落下加速度計が挙げられます。ほとんどすべてが安定条件を必要とするため、走行中の車両では動作できなくなります。そうしないと、多くのガルの誤差が生じることになります (加速度の cgs 単位 1 GAL = 1 cm/seg 2を使用します)。読み取り範囲が [たとえば WORDEN の範囲など] (5000 ミリガル) に達する測地重力計は別として、残りの部分はデバイスは「g」の値の小さな違いしか認識できません。
多くの XEE (車両内のこのような測定機器を 1 と呼びます )では 、その推進および制御機器が小型化されるたびに、2 つの問題を同時に解決する必要がありました。
- A)このような器具は、ENMOO 立方体の 0.6,000 分の 1 (数立方ミリメートル) 程度の体積に収まるように縮小します。
- B)地上単位に換算すると、GAL の 10 万分の 1 で評価できる正確な測定値を取得します。
私たちは、これらのOXOEEOIADUU (重力場測定器)の 1 つについて説明します。 これは、他のアプリケーションの中でも UULUEWAA (地上の木の実と同じ寸法で、任意の高さで移動できる、光音響検出器を備えた球体) に統合されています。この機器が到達する総体積は 29 立方ミリメートルに達しておらず、その設計にはトポロジカルな問題がより多く存在します。他の順序。その元素のほとんどすべてが小さなホウ素結晶(原子量 11 の安定同位体)に統合されているに違いありません。地球の専門家は、たとえその建設が引き起こすであろうすべての問題に直面するのに十分な技術レベルにまだ達していないとしても、そこからインスピレーションを得て、同様のプロジェクトを実行できることは確かです。
その動作の図を見てみましょう:
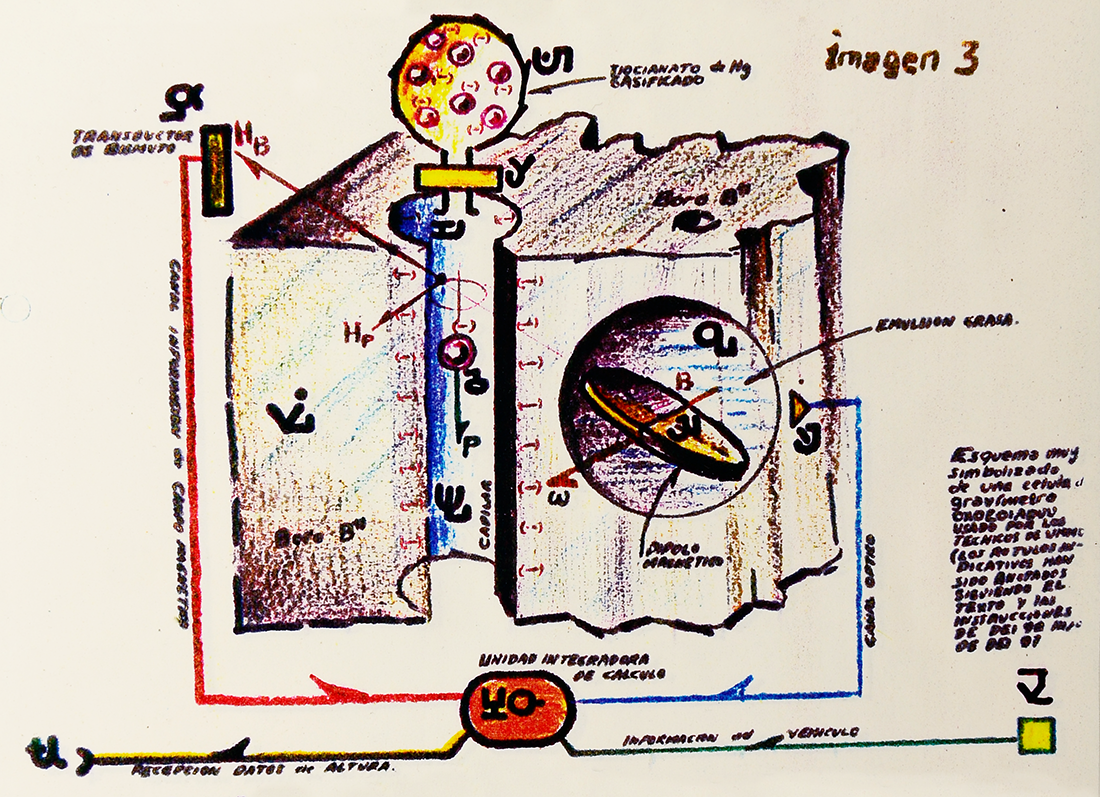
基本セルは、化学的に純粋で脱水された結晶化BOREの小型モジュール内に垂直に穴が開けられた円筒形の筐体 (  (D62-6-ideo1) ) (口径 9 ミクロンの キャピラリー) によって形成されます。円筒形の毛細管エンクロージャの内部には単一のガス分子が含まれておらず、その壁は負の静電荷で高度に分極された状態に保たれています(画像 3 を参照)。上部ゾーンでは、熱安定性の球形エンクロージャ (D62-6-ideo11)に、チオシアン酸水銀(D62-6-ideo2) (SCN) 2 Hg (マイナス電荷( – )を伴う) のイオン化分子によって形成された微量の希ガスが含まれています。 ( (D62-6-ideo3) )判別セルは( (D62-6-ideo12)を選択します)毛細管の最上部レベルでチオシアナート分子を放出することにより、チオシアナート分子を連続的に単離しました( (D62-6-ideo4) )。
(D62-6-ideo1) ) (口径 9 ミクロンの キャピラリー) によって形成されます。円筒形の毛細管エンクロージャの内部には単一のガス分子が含まれておらず、その壁は負の静電荷で高度に分極された状態に保たれています(画像 3 を参照)。上部ゾーンでは、熱安定性の球形エンクロージャ (D62-6-ideo11)に、チオシアン酸水銀(D62-6-ideo2) (SCN) 2 Hg (マイナス電荷( – )を伴う) のイオン化分子によって形成された微量の希ガスが含まれています。 ( (D62-6-ideo3) )判別セルは( (D62-6-ideo12)を選択します)毛細管の最上部レベルでチオシアナート分子を放出することにより、チオシアナート分子を連続的に単離しました( (D62-6-ideo4) )。




運動エネルギーレベルがゼロ で放棄された分子は、毛細管 内で自由落下プロセス(D62-6-ideo13)を開始します(その軸は垂直のままで、重力場の力線に接しています)。 
分子(D62-6-ideo5)は 、強い反発力により毛細管の壁に付着することができません。
負電荷(-)の分布によって生成される静電場が、同様に負(-)であるイオン化分子に作用するということです。
近接環境  (D62-6-ideo6) (ホウ素結晶に掘られた球形の囲い) では、磁気双極子 (クロムと鉄の合金で形成された 「微細な」楕円板
(D62-6-ideo6) (ホウ素結晶に掘られた球形の囲い) では、磁気双極子 (クロムと鉄の合金で形成された 「微細な」楕円板 (D62-6-ideo7) ) は、回転することを余儀なくされています。一定の角速度ωは 1 秒あたり約 60 ラジアンです。双極子は、キャビティ (直径 0.74 mm (脂質エマルション) を満たす液体の塊の中に浮遊しています (
(D62-6-ideo7) ) は、回転することを余儀なくされています。一定の角速度ωは 1 秒あたり約 60 ラジアンです。双極子は、キャビティ (直径 0.74 mm (脂質エマルション) を満たす液体の塊の中に浮遊しています (  (D62-6-ideo8) )。このようにして非常に弱い回転磁場が得られます が、ビスマストランスデューサ (( (D62-6-ideo9) ) (( (D62-6-ideo9)のフィールド値) H=0.00002 エルステッド
(D62-6-ideo8) )。このようにして非常に弱い回転磁場が得られます が、ビスマストランスデューサ (( (D62-6-ideo9) ) (( (D62-6-ideo9)のフィールド値) H=0.00002 エルステッド
(D62-6-img3)
図の横にある手書きのテキストの翻訳: UMMO エンジニアが使用する OXOEOIADUU 重力計セルの非常に象徴的な図。 (指示標識には、DEI 97 の息子である DEI 98 のテキストと指示に従って注釈が付けられています。
イオン化したチオシアン酸水銀分子が下降すると、今度は弱い磁場Hpが生成され、前方双極子によって生成される回転磁場 が乱されます。この乱れは、分析中の分子の移動の各時点での瞬間速度に依存します。さらに、分子の瞬間速度は「g」(重力加速度)の値に依存します。このような外乱は、その差動レベルが1 兆 分の1 ミリエルステッドのオーダーであっても検出および測定されます。 小型のXANMOO (コンピューター(D62-6-ideo10)と呼びます) は、3 つのチャネルの情報 ( (D62-6-ideo14) )を受け取ります。

•検出された磁場の
電気的手段による情報。
・双極子の回転速度に関する
光学的情報(ガラスフィラメント)。
• OXOEEOIADUU が搭載されている車両の加速度に関する
電気情報
この最後の情報は、チオシアナート分子  (D62-6-ideo16)に作用する重力以外の力によるエラーを無効にするために非常に重要です。(D62-6-ideo10) インテグレーター コンピューターは、チャネル( (
(D62-6-ideo16)に作用する重力以外の力によるエラーを無効にするために非常に重要です。(D62-6-ideo10) インテグレーター コンピューターは、チャネル( (  D62-6-ideo15) )を介して高度に関する情報を直接送信します。
D62-6-ideo15) )を介して高度に関する情報を直接送信します。